 Print
Print Recently, the research team from the National Time Service Center (NTSC), Chinese Academy of Sciences (CAS), investigated the rapid convergence of BDS/GNSS real-time satellite clock estimation. To address the long convergence time of conventional methods, the team proposed a Time-Differenced Carrier Phase (TDCP)-assisted undifferenced real-time satellite clock estimation approach, significantly improving the convergence performance of BDS/GNSS real-time satellite clock products.
This study was published in the international journal GPS Solutions on 8 May 2026 under the title “TDCP-assisted undifferenced multi-GNSS real-time satellite clock estimation.”
Real-time BDS/GNSS satellite clock products are fundamental for real-time Precise Point Positioning (PPP), navigation, and timing applications. However, traditional undifferenced real-time satellite clock estimation generally adopts a white noise model, which typically requires approximately 20–30 min to re-convergence after system restart or recovery from data interruptions. The unstable clocks during this convergence period can significantly degrade the performance of real-time positioning and time transfer.
To overcome this limitation, the NTSC, CAS research team proposed a TDCP-assisted undifferenced real-time satellite clock estimation method. In this approach, carrier-phase observations between adjacent epochs are time-differenced, effectively eliminating ambiguity parameters while retaining only the variations of satellite clocks, receiver clocks, and tropospheric delays. High-precision satellite clock variations are then estimated using a least-squares approach. Together with the estimated clock values from the last epoch, which are introduced as the a priori constraints into the Kalman filter for the current epoch, enabling rapid initialization and fast convergence of satellite clock estimation.
The proposed method was validated using one week of continuous observations collected from 66 globally distributed stations for the GPS, BDS-3, and Galileo. Five strategies were investigated: S1, the conventional white noise model; and S2–S5 with constraint variances of (0.2)2 ns2, (0.5)2 ns2, (0.8)2 ns2, (1.0)2 ns2, respectively. Experimental results demonstrated that the proposed method significantly improved both convergence speed and satellite clock precision compared with the traditional white noise model.
Using the optimal strategy S5 as an example, the average convergence times of GPS, BDS-3, and Galileo satellite clock estimation were reduced from 27.0, 33.4, and 21.1 min to 0.6, 0.4, and 0.4 min, respectively, with improvements exceeding 97%. In terms of clock estimation precision, the STD of GPS, BDS-3, and Galileo satellite clocks improved from 0.187, 0.178, and 0.097 ns to 0.041, 0.040, and 0.034 ns, respectively, representing improvements of more than 64%.
The research team further conducted real-time kinematic PPP experiments using data from 108 global stations. The results showed that, after applying the improved real-time satellite clock products, both horizontal and vertical PPP convergence times were reduced by more than 90%, while positioning accuracy improved by over 60%. Under the optimal strategy, PPP positioning accuracy reached 3.29 cm in the horizontal component and 3.21 cm in the vertical component.
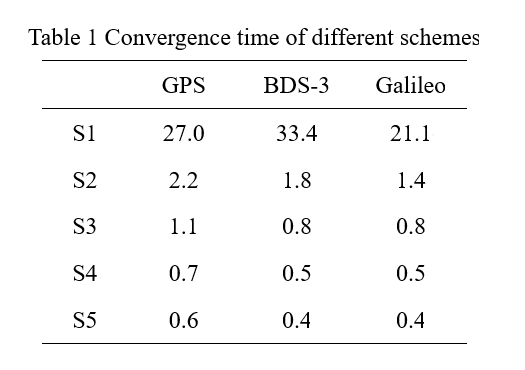
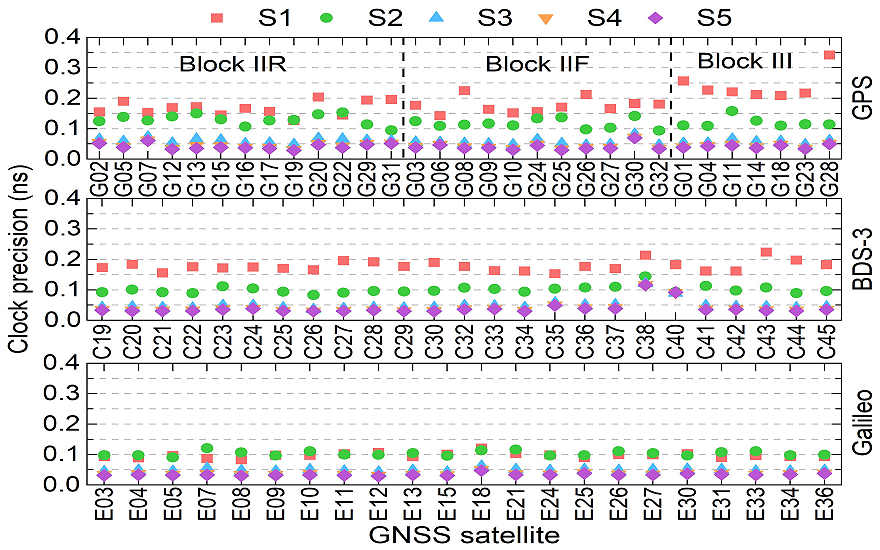
Figure 1 Average clock precision for different GNSS satellites applying S1 to S5 (Image by Xie et al. 2026)