 Print
Print A research team led by Prof. CHENG Fang from the National Time Service Center, Chinese Academy of Sciences focused on "Black Soil Wide-area Space-based Positioning Technology" proposed a new solution to support high-precision positioning of intelligent agricultural machinery operations, the Differential GNSS Visual Inertial Navigation System (DGVINS).
The results was published in Measurement Science and Technology.
The team conducted research on multi-sensor positioning technology in complex scenarios. In order to fully exploit the measurement of multiple sensors and further improve the robustness of the positioning results, The system organically integrates Differential GNSS (DGNSS), visual and inertial information under the framework of factor graph optimization, and provides accurate, robust and seamless positioning support for intelligent navigation applications.
According to the researcher, DGVINS makes full use of the measurement of all sensors based on factor graph optimization, and in order to adapt to the complex environment, the single-epoch ambiguity estimation method is used to avoid cycle slip detection when using the carrier phase of GNSS. Using different feature datasets, the performance of DGNSS, DGNSS+inertial navigation (DGINS) and standard single-point positioning + inertial navigation + vision (GVINS) algorithms was analyzed and the performance of different GNSS difference factor combinations in different environments was compared. The experimental results show that the positioning accuracy, stability and continuity of DGVINS are significantly improved in GNSS and visually challenging environments.
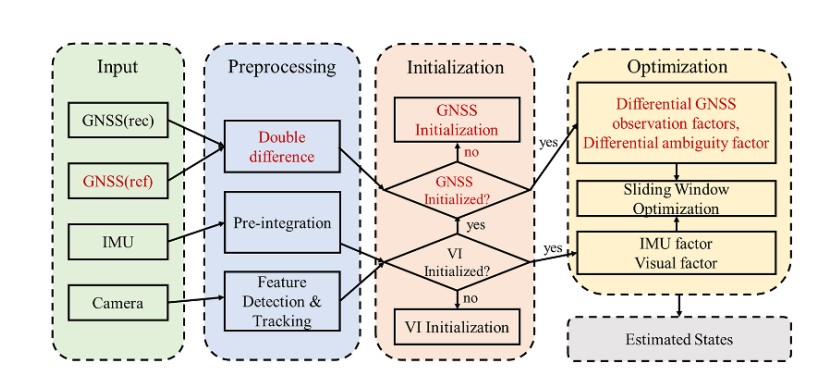
Figure 1. Flowchart of DGVINS(the red is the main innovation)(Image by NTSC)

Figure 2. Trajectory of different positioning modes in complex scene experiments(Image by NTSC)
Scientist compared the trajectory of RTK, GVINS, DGINS, DGNSS, and DGVINS in complex scene experiments (showed in Figure 2). It is important to note that due to the large scale of the map in the red straight section, it is not possible to observe the detailed details of the RTK failures in the map. The obvious deviation of the blue line represents the period when DGINS cannot be solved, which is mainly due to challenging scenarios and the poor IMU performance. In addition, the two locally enlarged images marked in red show the poor performance of DGNSS and GINS in challenging scenes, and these experimental trajectories provide a basis for analysing the performance of different positioning modes in complex environments.
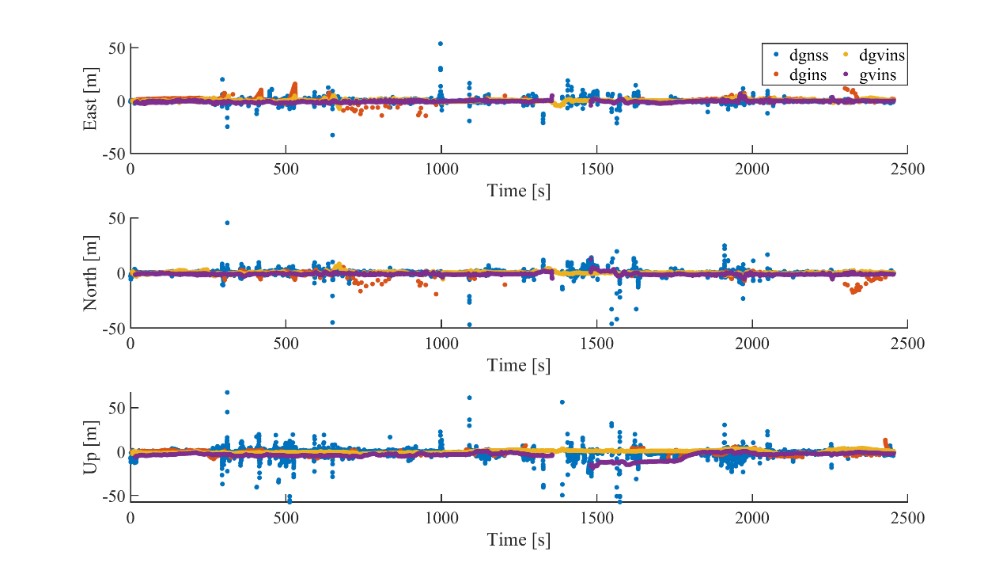
Figure 3. Positioning accuracy of different positioning modes in complex scene experiments
(Image by NTSC)
Then researchers analyzed the positioning accuracy of different positioning modes in complex scene experiments (Figure 3). It can be seen that the GVINS oscillates in this data set, with a failure time of about 2 minutes, which is about 5% of the total runtime, and during the GVINS failure, the positioning error is more than 100 meters, which is catastrophic for any positioning service. In contrast, the DGVINS is able to operate stably throughout the scene during GVINS failures, and its accuracy is better than 1m in most cases.
This experiment not only highlights the better accuracy and stability of DGVINS over GVINS, but also demonstrates its potential as a more promising solution for precise, continuous, and seamless positioning and navigation.